3D Trajectory Generation
Overview
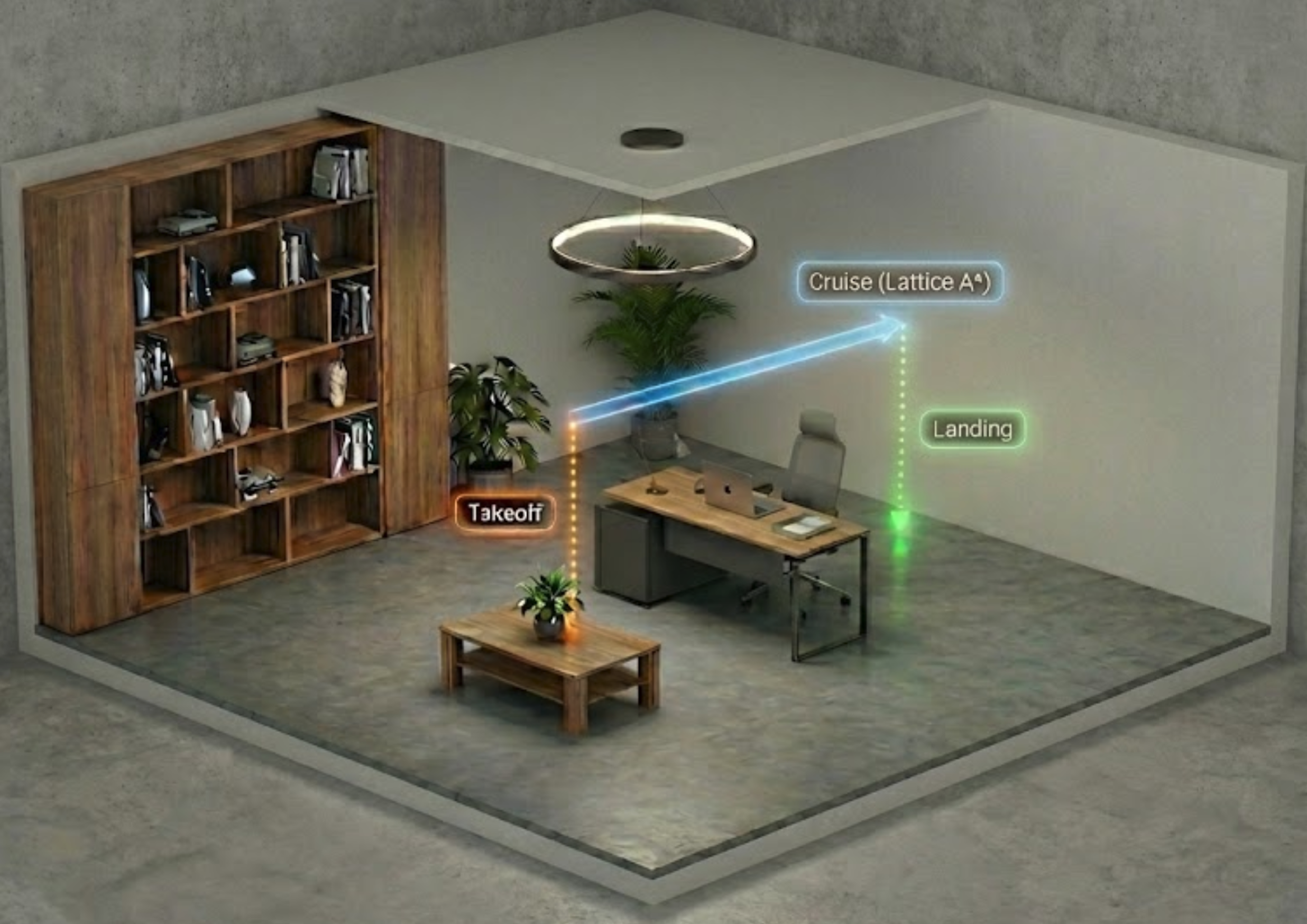
Built a robust pipeline to generate diverse 3D navigation paths in the Habitat simulator for training vision-language navigation policies on aerial robots.
Key Features
- 3D Path Generation: Robust pipeline for generating various 3D trajectories in Habitat
- Aerial Navigation: Overcame simulator limitations originally designed for ground robots
- Obstacle Detection: Designed robust 3D obstacle detection for drone navigation
- General Policy: Trained a strong and generalizable navigation policy for drones