Code: github.com/YC11Hou/habitat-aerial-nav
Demo
Overview
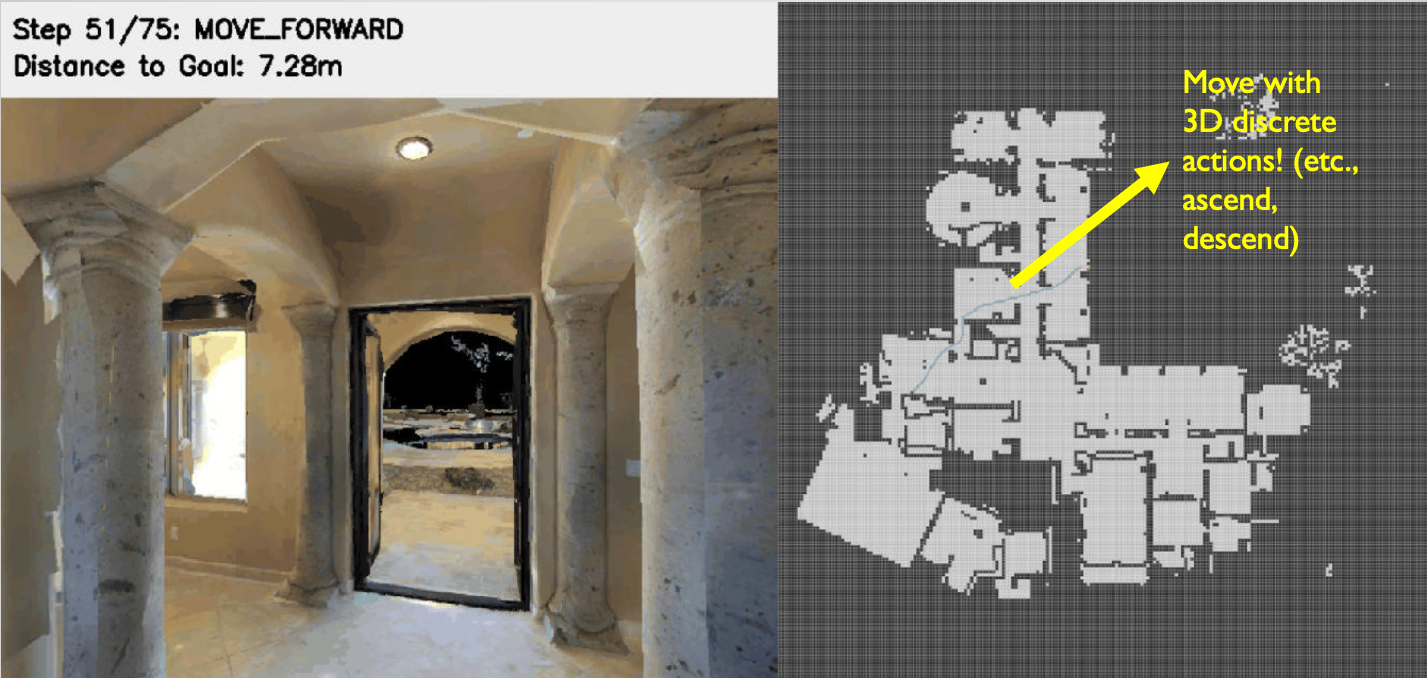
Built a robust pipeline to generate diverse 3D navigation trajectories in the Habitat simulator for training vision-language navigation (VLN) policies on aerial robots.
Simulator: Habitat with 90 indoor scenes.
Pipeline
-
Start-Goal Pair Generation — For each of the 90 scenes, generate 200–300 random 2D start-goal pairs as navigation endpoints.
-
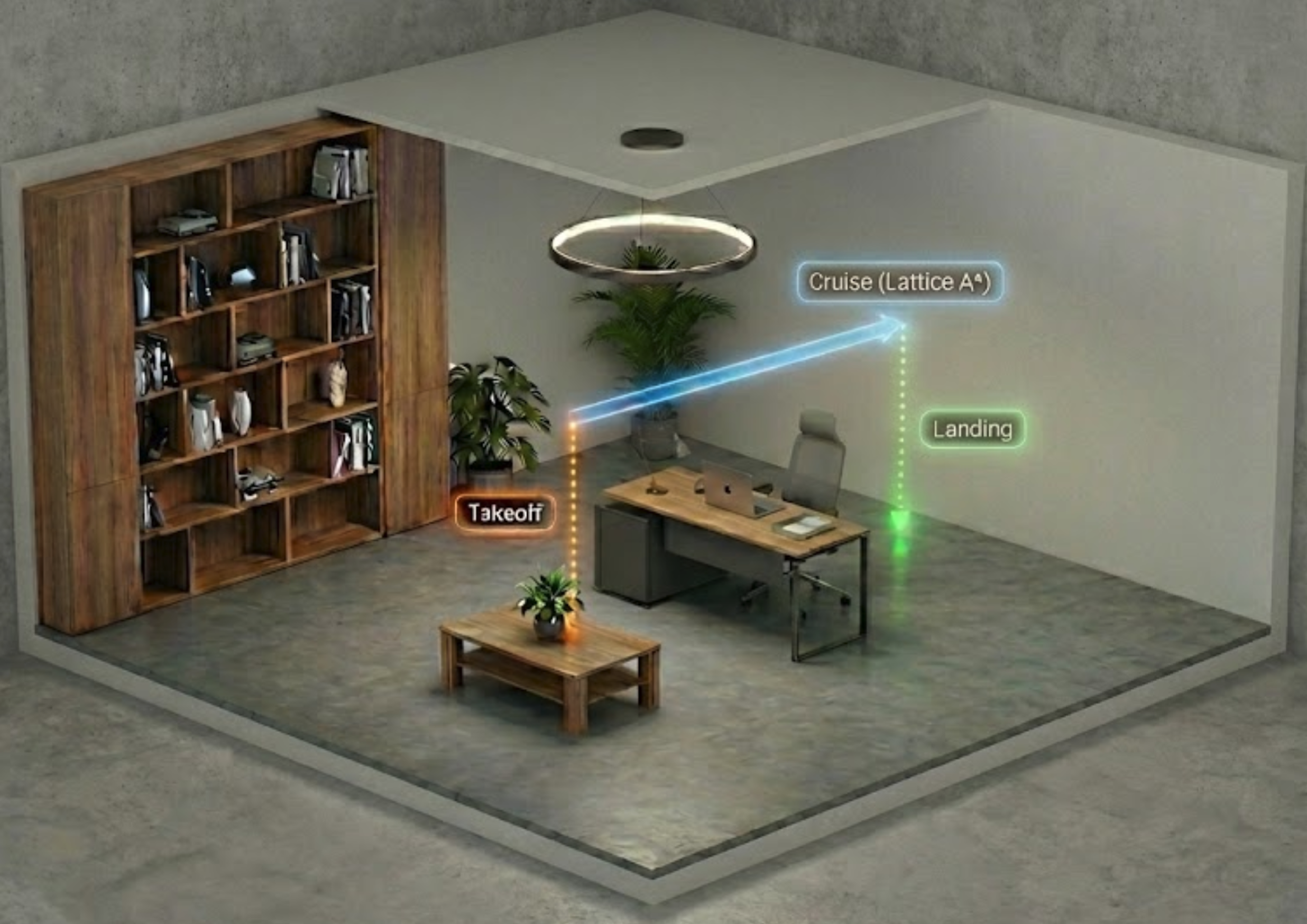
2D Cruise Path Planning — Determine a suitable constant cruising altitude for each scene, then plan a natural 2D path at that altitude using Lattice A*. Unlike standard Grid A* which produces rigid right-angle turns, Lattice A* plans over motion primitives in continuous state space \((x, y, \theta)\), producing smooth paths where the agent turns while moving forward. Heuristic:
\[H(s) = \frac{\|p - p_{goal}\|}{L} + \lambda \cdot |\Delta\theta|\]This penalizes sharp turns to ensure smooth, realistic flight trajectories.
-
3D Trajectory Assembly — Prepend a takeoff segment and append a landing segment to each cruise path, forming a complete 3D trajectory. Collect RGB-D observations along the full path as video.
-
Instruction Generation — Use a video-to-text model to generate natural language navigation instructions from the collected observation videos, producing a complete VLN dataset.