Demo
Overview
An autonomous rescue robot designed to explore unknown indoor environments and mark the locations of injured persons. The robot autonomously navigates, builds a map in real time, and detects casualties along the way.
Hardware
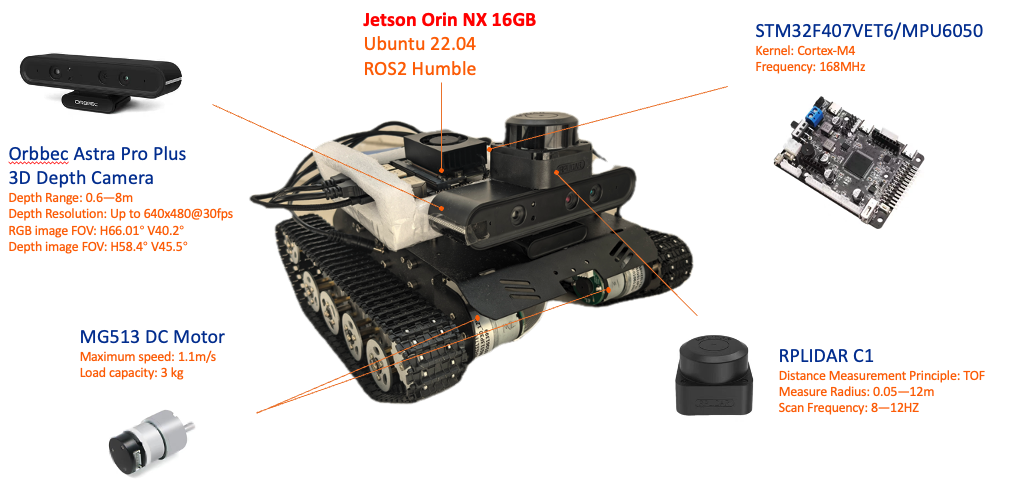
- Jetson Orin NX 16GB — onboard compute (Ubuntu 22.04, ROS2 Humble)
- RPLIDAR C1 — 2D LiDAR for SLAM and mapping
- Orbbec Astra Pro Plus — 3D depth camera for YOLO-based casualty detection
- STM32F407VET6 / MPU6050 — motor control and IMU
- MG513 DC Motors — differential drive
Software Stack
- Cartographer — real-time SLAM (mapping and localization)
- Navigation2 — point-to-point autonomous navigation
- YOLOv11 — casualty detection via depth camera
Key Contribution: Information-Gain Frontier Exploration
Standard frontier exploration creates redundant paths. We formulate an optimized frontier selection that balances new information against travel cost:
\[f^* = \arg\max_{f \in F} \left( w_1 \cdot I_f - w_2 \cdot D_f \right)\]where \(I_f\) is the information gain of frontier \(f\) and \(D_f\) is the navigation cost. The robot selects the frontier that maximizes expected coverage while minimizing unnecessary travel.